Several advantages of MR imaging compared with other imaging modalities have provided the rationale for increased attention to MR-guided interventions, including its excellent soft tissue contrast, its capability to show both anatomic and functional information, and no use of ionizing radiation. An important aspect of MR-guided intervention is to provide visualization and navigation of interventional devices relative to the surrounding tissues. This article focuses on the methods for MR-guided active tracking in catheter-based interventions. Practical issues about implementation of active catheter tracking in a clinical setting are discussed and several current application examples are highlighted.
Key points
- •
MR imaging shows great promise as a tool for guiding interventions because it provides three-dimensional imaging capabilities with excellent soft tissue contrast and functional information without ionizing radiation.
- •
MR-guided active catheter tracking can provide rapid and robust catheter visualization.
- •
Combined with MR imaging, it allows simultaneous visualization of the device and the surrounding anatomy.
- •
Active catheter tracking provides several features that may prove valuable for clinical applications.
- •
The development of active catheter tracking is an indispensable step toward fully MR-guided clinical interventions.
Introduction
In recent years, there has been growing interest in using MR imaging to provide guidance for catheter-based interventions. Traditionally, most catheter interventions are performed under x-ray fluoroscopy, which allows good visualization of the device but lacks surrounding anatomic information. Most importantly, ionizing radiation involved in x-ray fluoroscopy is harmful for both the patients and the physicians. MR imaging is a promising alternative to guide intervention because it provides several advantages compared with other imaging modalities, including excellent soft tissue contrast, the ability to provide functional information, and a lack of ionizing radiation. An essential requirement for MR-guided intervention is to track and navigate the interventional devices, such as catheters, needles, and implants, to the target.
For device tracking inside an MR environment, 2 different approaches are commonly used: passive tracking and active tracking. There are approaches proposed that do not belong to these 2 categories and can be classified into a third category of hybrid techniques, which is beyond the scope of this article. MR-guided passive tracking is for visualizing a device within MR images based on the negative or positive contrast generated by intrinsic material characteristics. The contrast can be created and enhanced by incorporating ferromagnetic or paramagnetic materials into the device, or by using contrast agents. Specific imaging sequences have also been proposed to improve the visualization. In contrast, active devices with embedded radiofrequency (RF) coils, antennas, or other sensors can generate conspicuous signals for localization. The major advantage of active tracking compared with passive tracking is that the unambiguous three-dimensional (3D) information is generated with high temporal and spatial resolution, which potentially leads to shorter procedure times and improved procedure outcome.
This article reviews state-of-the-art MR-guided active catheter tracking techniques, focusing on the principles and implementation in a clinical setting. Safety issues related to active tracking in MR-guided intervention are discussed, and several preclinical and clinical applications are presented.
Introduction
In recent years, there has been growing interest in using MR imaging to provide guidance for catheter-based interventions. Traditionally, most catheter interventions are performed under x-ray fluoroscopy, which allows good visualization of the device but lacks surrounding anatomic information. Most importantly, ionizing radiation involved in x-ray fluoroscopy is harmful for both the patients and the physicians. MR imaging is a promising alternative to guide intervention because it provides several advantages compared with other imaging modalities, including excellent soft tissue contrast, the ability to provide functional information, and a lack of ionizing radiation. An essential requirement for MR-guided intervention is to track and navigate the interventional devices, such as catheters, needles, and implants, to the target.
For device tracking inside an MR environment, 2 different approaches are commonly used: passive tracking and active tracking. There are approaches proposed that do not belong to these 2 categories and can be classified into a third category of hybrid techniques, which is beyond the scope of this article. MR-guided passive tracking is for visualizing a device within MR images based on the negative or positive contrast generated by intrinsic material characteristics. The contrast can be created and enhanced by incorporating ferromagnetic or paramagnetic materials into the device, or by using contrast agents. Specific imaging sequences have also been proposed to improve the visualization. In contrast, active devices with embedded radiofrequency (RF) coils, antennas, or other sensors can generate conspicuous signals for localization. The major advantage of active tracking compared with passive tracking is that the unambiguous three-dimensional (3D) information is generated with high temporal and spatial resolution, which potentially leads to shorter procedure times and improved procedure outcome.
This article reviews state-of-the-art MR-guided active catheter tracking techniques, focusing on the principles and implementation in a clinical setting. Safety issues related to active tracking in MR-guided intervention are discussed, and several preclinical and clinical applications are presented.
Methods of magnetic resonance–guided active tracking
Active Magnetic Resonance Tracking with Microcoils
Active MR tracking can be achieved using an MR tracking pulse sequence with small RF receive coils (microcoils) that are incorporated into interventional instruments ( Fig. 1 ). The sequence begins with a spatially nonselective RF pulse to excite all the spins within a large volume inside the RF transmit coil (eg, body coil). Then, a magnetic field gradient is applied along 1 spatial direction, making the magnetic field vary monotonically with the position along that direction. Hence, the frequency of the spins at different locations, which is also the frequency of the MR signal received, linearly depends on the spins’ location. Different from a conventional MR receive coil, a microcoil has a limited receive sensitivity profile. It can only detect MR signals from the spins in the immediate vicinity of the microcoil. As a consequence, the MR signal received by a microcoil is shown as a sharp peak in the frequency spectrum (see Fig. 1 C). The location of the signal peak in the frequency domain indicates the microcoil’s spatial location along the axis of the applied gradient. If this process is performed with the magnetic gradient applied along 3 orthogonal directions, the 3D coordinates of the coil can be obtained. By integrating different coils connected to individual receive channels, this approach is capable of tracking multiple coils simultaneously for visualizing the trajectory of a catheter rather than only its tip position.
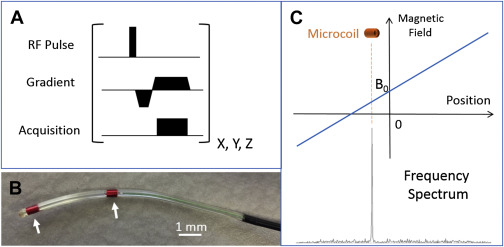
For robust tracking with microcoils, several strategies can be applied. First, any variation to the static magnetic field (B 0 ) distorts the linear relationship between the MR tracking signal frequency and the microcoil’s location. This resonance frequency offset may be caused by the transmitter and receiver frequency offset, or B 0 inhomogeneities created by the device. In active tracking, the microcoils are usually at or near the interface between the tissue and the device where the magnetic susceptibility difference between the two greatly distorts the local magnetic field. This situation leads to either loss of the received tracking signal or imprecise calculation of the device location. Several multiplexing acquisition schemes have been proposed to eliminate the resonance offset errors. In these schemes, 4 excitations are usually required with certain modulation of the gradients’ appearance and polarity along x, y, and z axes. Another important strategy is phase field dithering, which is especially useful in low signal-to-noise ratio conditions. It uses dephasing gradients in a rotating fashion on the orthogonal plane to the frequency-encoding gradient. This strategy dramatically improves the tracking quality by reducing the undesirable coupling with the body coils or other conducting devices.
Active Magnetic Resonance Tracking with Antennas
To enable the whole-shaft visibility of the catheter, active visualization methods using antennas connected to an MR receiver were proposed. Different from passive tracking, the active visualization (profiling) of the device is based on the conspicuous signal received by tracking antennas on separate channels other than conventional imaging channels. There are 2 main types of antennas: magnetically coupled loop antennas (coils) and electrically coupled loopless (rod) antennas.
A loop antenna is a loop coil wound thinly and extended along a certain length of the interventional instrument (eg, catheters). Because of limited receive sensitivity of the coil, conventional MR imaging with the loop antenna can outline the instrument. Different coil geometries can be used so long as the coil’s sensitivity can be highly localized.
A loopless antenna is essentially a wire that can be easily integrated into more flexible and thinner interventional instruments. Similar to a loop antenna, it also serves as a receive-only antenna that can detect signals from its surroundings, and the resultant MR image delineates the instrument. The difference is that such an antenna has extremely high sensitivity in a cylindrical volume with a significantly greater size than that of the catheter. This property hinders sharp delineation of the instrument, but it can reveal the anatomy surrounding the instrument.
Active Tracking with Measurement of Gradients
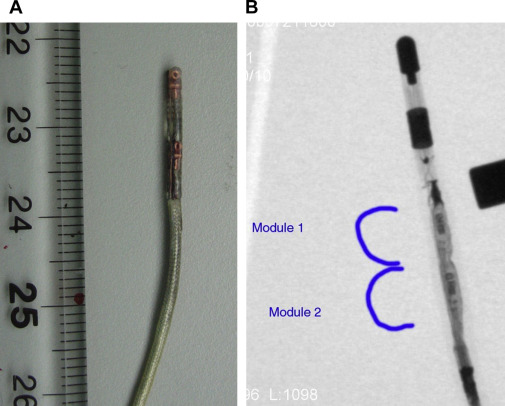
Another active tracking technique that does not rely on visualization with MR imaging uses the spatially varying gradients of the MR system. Robin Medical, Inc (Baltimore, MD) developed a miniature tracking sensor that has 3 orthogonal pickup coils to measure the voltages induced by the changing magnetic fields (gradients) inside the MR scanner. By comparing the measured signals with the gradient field map of the scanner, which is acquired in advance, the current location and orientation of the sensor (6 degrees of freedom) can immediately be determined. Specifically, for catheter-based applications, such sensors were integrated into the tip of MR imaging–compatible catheters ( Fig. 2 ). Another mechanism for measuring the gradient fields is to use an optical sensor using the Faraday effect, which can also generate position and orientation information in the MR scanner.
Visualization of magnetic resonance–guided active tracking
Visualization on MR Images
In MR-guided active tracking with microcoils, the calculated coil positions use the same MR scanner coordinate system as MR imaging because the same frequency-encoding principle of MR tracking also applies to MR imaging. As a consequence, virtual markers representing microcoil positions from MR tracking can be directly overlaid on the preacquired MR images for visualization without time-consuming registration ( Fig. 3 A, B ).
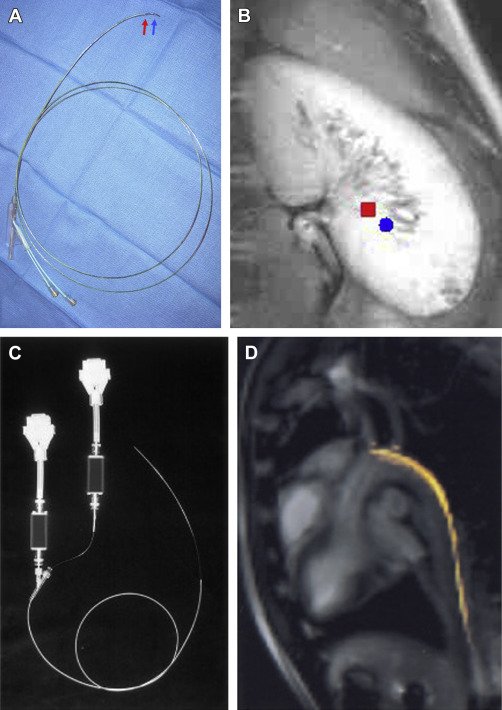
In MR-guided active tracking with antennas, the catheter-related signal is intrinsically visualized as part of the MR image. In addition, for better identification, the signals from the active device channels can be depicted in color and displayed with the conventional gray-scale images acquired by the body coil (see Fig. 3 C, D). The visualization of the whole device requires the full length of the device contained within the imaging slice. Therefore, a thick imaging slice is usually prescribed and the slice may need to be manually repositioned when the catheter is moving.
Combining Active Tracking with Real-time Imaging
For the active tracking methods with numeric output of locational information (eg, tracking with microcoil and tracking with sensors measuring magnetic field), tracking sequence can be interleaved with a fast MR imaging sequence so that the 3D spatial coordinates of the device can be used by a subsequent imaging sequence to automatically shift the imaging plane with movement of the device. This property allows two-dimensional images of the surrounding anatomy to be updated in real time at the location of the device.
For active tracking with antennas, the real-time imaging plane needs to be adjusted interactively in real time to contain the device in the image plane, which sometimes causes delays and inaccuracies, so this approach is not ideal for real-time tracking. One solution to this problem is to perform device-only projection imaging that allows the entire device to be seen even if the portion is outside the conventional imaging slice. A further improvement is an iterative predication correction algorithm that can reconstruct the 3D trajectory of the catheter based on the projection images in a fraction of a second.
Visualization Interface of Active Catheter Tracking
The development of graphical interfaces is one of the key components of applying active catheter tracking in a clinical setting. It should allow clear and real-time visualization of both the catheters and the surrounding anatomic and functional information revealed by imaging with an easy-to-operate interactive user interface.
All the major MR scanner vendors have developed interactive graphical interfaces that support active catheter tracking. Siemens introduced the Interactive Front End (Siemens Corporate Research, Baltimore, MD), which can provide flexible control over the scan plane orientation and imaging parameters. The signals from the catheter coil channels can be color coded and visualized as part of the real-time MR images. For active catheter tracking with microcoils, graphical representations of catheters are displayed based on the curve fitted to the tracked coil positions and superimposed on the incoming real-time MR images ( Fig. 4 ). Similarly, Philips Healthcare developed the iSuite real-time interactive interface, which integrated active catheter visualization and real-time imaging options ( Fig. 5 ). Besides these vendor-specific applications, in-house solutions for visualization of active catheter tracking were developed under open-source software; for example, Visual Understanding of Real-Time Image Guided Operations (VURTIGO), which focuses on electrophysiology applications, and 3D Slicer, which is a more generic platform for image-guided device tracking.
Related posts:
 Evolution of Movement Disorders Surgery Leading to Contemporary Focused Ultrasound Therapy for Tremor
Magnetic Resonance Imaging–Guided Spine Interventions
Magnetic Resonance–Guided Passive Catheter Tracking for Endovascular Therapy
Evolution of Movement Disorders Surgery Leading to Contemporary Focused Ultrasound Therapy for Tremor
Magnetic Resonance Imaging–Guided Spine Interventions
Magnetic Resonance–Guided Passive Catheter Tracking for Endovascular Therapy
 Magnetic Resonance–Guided Gynecologic Brachytherapy
Magnetic Resonance-Guided Prostate Biopsy
Magnetic Resonance Sequences and Rapid Acquisition for MR-Guided Interventions
Magnetic Resonance–Guided Gynecologic Brachytherapy
Magnetic Resonance-Guided Prostate Biopsy
Magnetic Resonance Sequences and Rapid Acquisition for MR-Guided Interventions
Stay updated, free articles. Join our Telegram channel

Full access? Get Clinical Tree


