
The Magnetic System
Image-guided neurosurgery has rapidly evolved in recent years, paralleling advances in computer technology and computerized imaging. Guidance depends on correlating an imaging data set with real space at the time of surgery. To accomplish this, surgical space needs to be defined with regard to a frame of reference. Traditionally, a stereotactic frame with rigid skull fixation has been used at the time of image acquisition to define space on the imaging data set as well as in real space at the time of surgery. Greater computer power and volumetric imaging have now made it possible to correlate volumetrically acquired images with surgical space by using surface landmarks on the patient’s head, rather than frame placement, for imaging and surgery.1 However, surface anatomical landmarks and skin markers do not have the same accuracy as a frame with skull fixation.
 Frameless Image-Guided Surgery
Frameless Image-Guided Surgery
In the absence of a frame, surgical space must be defined by rigid fixation of the head to the operating table at the time of surgery using a head holder. Subsequent surface registration of patient landmarks requires a probe that can be tracked within the defined space. A variety of methods have been employed to track probes in space. Some systems use a probe on a digitized articulated arm attached to the head holder.2–3 Others use ultrasonic emission and triangulation.4–6 Many systems use optical tracking and triangulation of a probe that is active (light emitting diodes)7 or passive (reflective markers).8 This requires an array of markers rigidly attached to the head holder that function as a frame of reference. An alternative is to define space within a magnetic field by attaching a magnetic field generator to the head holder and then tracking a probe with an attached magnetic receiver.9–10 This is the principle of the Cygnus-PFS system (Compass International, Rochester, MN) described in this chapter.
 Magnetic Field Referencing of Stereotactic Space
Magnetic Field Referencing of Stereotactic Space
A static magnetic field is used as a frame of reference once the patient’s head is immobilized in three-point fixation. The magnet is attached to the head holder and remains immobile from the time of registration onward. When the patient is draped, the magnet remains concealed under the drapes. The receiver and probe are exchanged for an alternate sterile receiver and probe. Defining space with a magnetic field allows excellent continuous tracking of a probe during surgery because there is no interference with probe tracking such as that experienced with optical tracking systems where a line of sight must be maintained between the tracking cameras, reference markers, and probe markers. In theory, interference from metal objects within the surgical field may compromise tracking accuracy. In practice, this has not been an issue (see discussion of accuracy later in this chapter).
Applications and setup
Because stereotactic space is defined in relation to a magnet, the Cygnus-PFS system allows unprecedented portability—neither tracking cameras nor cumbersome articulated arm systems are required. The core of the Cygnus-PFS system is the magnet with a control unit and a laptop computer (Fig. 6–1).9 This allows for easy transport between hospitals. The magnet attaches to the outer starburst of a three-point head holder via an adjustable L-bracket. An optional stand with a touch-screen control panel/monitor is available for more sedentary use (Fig. 6–2).

FIGURE 6–1. Cygnus-PFS setup for surgery illustrating magnet attached to head holder via L-shaped bracket, laptop computer, and magnetic control unit under computer (Compass International, Rochester, MN).
Data acquisition is very efficient and requires less than 5 minutes. This is accomplished via an ethernet card or using an outboard digital archive tape (DAT) drive connected to the small computer system interface (SCSI) port of the laptop. The computer then builds three-dimensional models of the head for registration of landmarks in image space. A second data set can then be correlated to the primary data set, [i.e., computed tomography (CT) with magnetic resonance imaging (MRI)] thus allowing simultaneous use of two data sets during surgery (Fig. 6–3). Under “Image Registration,” landmarks and fiducials are selected on the imaging data set for subsequent correlation with the homologous landmarks in real space on the patient at the time of surgery. This process of image and subsequent patient registration is similar in all commonly used image-guidance systems. The Cygnus-PFS laptop allows all the preoperative planning to be performed anywhere.
At the time of surgery, after the patient is positioned and in three-point fixation, the Cygnus-PFS magnet is attached to the head holder via an L-bracket. The laptop is connected to the electromagnetic control unit and the appropriate patient study is loaded. A nonsterile magnetic field receiver and probe are attached to the Cygnus control unit, and patient landmarks are registered on the patient by touching these with the probe. Following registration and draping, the receiver and probe are exchanged for a sterile receiver and probe and the system is ready for intraoperative use.
Features
The Cygnus-PFS has many of the same features as other image-guidance systems, including target volume planning, trajectory planning, and image correlation (image fusion). Image correlation can be used to correlate CT with MRI (see Fig. 6–3), different MRI sequences [i.e., spoiled gradient echo (SPGR) with fluid attenuated inversion recovery (FLAIR)], or functional imaging. Preoperative planning and image correlation with the Cygnus-PFS are particularly user-friendly and usually take less than 5 minutes.
Unique hardware features include not only a biopsy needle holder, but different-length probes that can be angled or straight and also used as suction probes. This is particularly useful during surgery because suction is the most commonly held tool during surgery. In this manner, image guidance can continuously demonstrate the position of the suction tip without the need to pick up a dedicated probe. We find this more practical than tracking bipolar cautery or any number of other surgical instruments. The Cygnus-PFS probes, including the suction probes, are all disposable, which is also a unique feature of increasing importance in contemporary practice.
The Cygnus-PFS has a number of extremely intelligent, useful, and instructive software features. Upon completion of patient registration at surgery, a registration screen gives a calculated global accuracy (root mean square error), as do all image-guidance systems. In addition, a readout of the individual calculated error for each correlation point is given (Fig. 6–4). This is not readily available with many systems. Of particular interest, a feature called Show Registration on Images displays side-by-side images of landmarks in “image space” versus “real space” (Fig. 6–5). This feature has proven very instructive for understanding the source of inaccuracies at the time of patient registration, leading to higher true surgical accuracy.
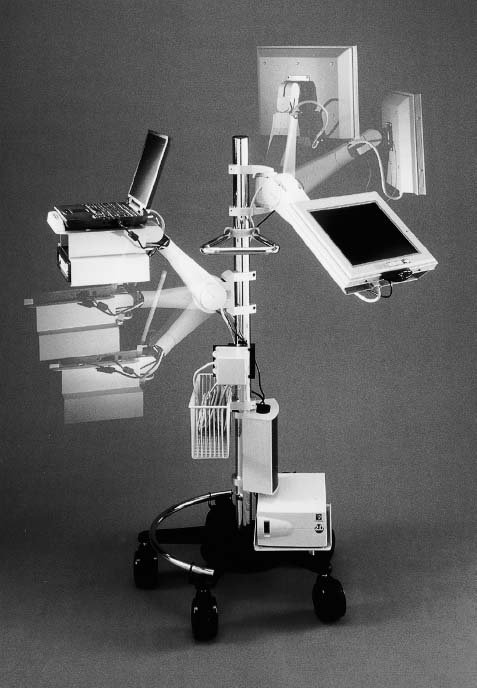
FIGURE 6–2. Optional Cygnus-PFS stand featuring movable touch-screen monitor (Compass International, Rochester, MN).
During surgery there are a number of useful options. In addition to three orthogonal views (axial, coronal, and sagittal) a fourth “trajectory view” is available for simultaneous viewing (Fig. 6–6
Related posts:


Stay updated, free articles. Join our Telegram channel

Full access? Get Clinical Tree


