Fig. 1
Segmentation model and segmentation pipeline. a The model compartments being used for model localization (based on the generalized Hough transform). b Parametric adaptation. Individual affine transformations are assigned to the “anchoring structures” femur/pelvis/lungs. The vertebrae are deactivated in this step (transparent) to avoid wrong mesh to image vertebra assignments. All vertebrae are positioned according to the remaining components. c Deformable adaptation. In this final step, the segmentation is refined using local mesh deformations. All vertebrae are consecutively activated and adapted to the image (from sacrum to neck) to ensure correct vertebra labelings
The surface model being used as shape prior for segmentation is shown in Fig. 1a. Since a direct vertebra segmentation from whole-body images is prone to localization errors, we choose a combined model that includes tissues that serve as “anchoring strucures” for the vertebrae: (1) femur/pelvis and (2) lungs. Note that both femur and pelvis were chosen as anchoring structures in the pelvic region because they showed most reliable segmentation results due to clear image deliniations between bone and soft tissue. In other words, we first segment femur/pelvis/lungs to initially place the vertebrae at their approximate position (i.e. within the capture range), before they are locally adapted to the image. The segmentation pipeline consists of three steps (see [10] for details):
Step 1. Model localization. In this first step, the model is located in the image at the approximately correct position. The localizer is based on the generalized Hough Transform (GHT) and attempts to align mesh triangles with image gradients. Step 2. Parametric adaptation. Multiple rigid/affine transformations of the anchoring structures (different colors in Fig. 1b) allow registration of these structures with the image. In this step all vertebrae are deactivated (transparent in Fig. 1b) to avoid wrong anatomical correspondences between mesh and image vertebra. They are rather passively scaled and positioned at their approximate location in the image based on the transformations of the anchoring structures. Step 3. Deformable adaptation. In this final step, first all anchoring structures are simultaneously adapted to the image using local deformations. The vertebrae are then successively activated (from sacrum to neck) to ensure a correct localization of each individual vertebra: first the lumbar vertebra 5 is activated and adapted to the image, then the next lumbar vertebra 4 is activated and adapted, then lumbar vertebra 3, etc. (Fig. 1c). This iterative activation and adaptation is repeated until the top thoracic vertebra 1 is reached.
2.2 Multi-modal Features
Fig. 2
Target point detection using multi-modal image features. For each mesh triangle, a search profile is defined along the perpendicular triangle direction. Target points  and
and  are detected as the one points that maximize a feature response (such as the maximum image gradient) in the water (a) and in the fat image (b), respectively. During adaptation, the mesh triangle is simultaneously attracted to
are detected as the one points that maximize a feature response (such as the maximum image gradient) in the water (a) and in the fat image (b), respectively. During adaptation, the mesh triangle is simultaneously attracted to  as well as to
as well as to 
and are detected as the one points that maximize a feature response (such as the maximum image gradient) in the water (a) and in the fat image (b), respectively. During adaptation, the mesh triangle is simultaneously attracted to as well as to During parametric as well as during deformable adaptation, the mesh triangles are attracted to image target points detected by the following algorithm (Fig. 2). For each mesh triangle, we construct a search profile (perpendicular to the triangle) of  points
points  with
with ![$$i\in [-l, l]$$](/wp-content/uploads/2016/03/A323246_1_En_14_Chapter_IEq7.gif) and search for a target point that maximizes an image feature response
and search for a target point that maximizes an image feature response 
![$$\begin{aligned} x = \underset{\{x_i\}}{\arg \max } \left[ F (x_i) \right] . \end{aligned}$$](/wp-content/uploads/2016/03/A323246_1_En_14_Chapter_Equ1.gif)
Each feature  evaluates the image gradient strength and checks the local image appearance such as trained intensity values. For instance, edges may be rejected if the intensity values at the inner and outer side of a triangle do not match the trained expectation. Note that these trained intensity values are modality-specific.
evaluates the image gradient strength and checks the local image appearance such as trained intensity values. For instance, edges may be rejected if the intensity values at the inner and outer side of a triangle do not match the trained expectation. Note that these trained intensity values are modality-specific.
points with and search for a target point that maximizes an image feature response (1)
evaluates the image gradient strength and checks the local image appearance such as trained intensity values. For instance, edges may be rejected if the intensity values at the inner and outer side of a triangle do not match the trained expectation. Note that these trained intensity values are modality-specific.While commonly a single modality, or image, is being used for feature detection, we use multiple modalities (here the Dixon water and fat images). Figure 2 illustrates these multi-modal image features for a single triangle. First, the triangle attempts to detect a target point  in the water image (Fig. 2a). Second, the same triangle attempts to detect a target point
in the water image (Fig. 2a). Second, the same triangle attempts to detect a target point  in the fat image (Fig. 2b). This approach is repeated for all triangles on the mesh to derive a sequence of water target points
in the fat image (Fig. 2b). This approach is repeated for all triangles on the mesh to derive a sequence of water target points  as well as a sequence of fat target points
as well as a sequence of fat target points  . During adaptation an external energy term is minimized that simultaneously attracts the mesh triangles to all
. During adaptation an external energy term is minimized that simultaneously attracts the mesh triangles to all  as well as to all
as well as to all  . A simplified energy formulation from [10] can be described as:
. A simplified energy formulation from [10] can be described as:
![$$\begin{aligned} E_{ext} = \sum _{t=0}^{T}\left[ c_t-x_{t}^{water}\right] ^2 + \sum _{t=0}^{T}\left[ c_t-x_{t}^{fat}\right] ^2, \end{aligned}$$](/wp-content/uploads/2016/03/A323246_1_En_14_Chapter_Equ2.gif)
where  is the triangle center with index
is the triangle center with index  , and
, and  is the number of mesh triangles.
is the number of mesh triangles.
in the water image (Fig. 2a). Second, the same triangle attempts to detect a target point in the fat image (Fig. 2b). This approach is repeated for all triangles on the mesh to derive a sequence of water target points as well as a sequence of fat target points . During adaptation an external energy term is minimized that simultaneously attracts the mesh triangles to all as well as to all . A simplified energy formulation from [10] can be described as:(2)
is the triangle center with index , and is the number of mesh triangles.To allow target point detections as shown in Fig. 2, image features were trained (see [11] for details) from ground truth annotations which were generated in a bootstrap-like approach. An initial model (with  1000 triangles forming the mesh surface of a each vertebra) was manually adapted to the images of the first subject. This annotation was used for independent feature training on the water and fat image, respectively. The resulting model was adapted to the images of the second subject (using multi-modal image features as described above) and manually corrected if required. This annotation was included in a new feature training and the resulting model was applied to the images of the next subject. This process was repeated until ground truth annotations from all patients were available.
1000 triangles forming the mesh surface of a each vertebra) was manually adapted to the images of the first subject. This annotation was used for independent feature training on the water and fat image, respectively. The resulting model was adapted to the images of the second subject (using multi-modal image features as described above) and manually corrected if required. This annotation was included in a new feature training and the resulting model was applied to the images of the next subject. This process was repeated until ground truth annotations from all patients were available.
1000 triangles forming the mesh surface of a each vertebra) was manually adapted to the images of the first subject. This annotation was used for independent feature training on the water and fat image, respectively. The resulting model was adapted to the images of the second subject (using multi-modal image features as described above) and manually corrected if required. This annotation was included in a new feature training and the resulting model was applied to the images of the next subject. This process was repeated until ground truth annotations from all patients were available.Example images of a single patient, Pat1, and the resulting image features from all trainings are shown in Fig. 3, for the water (Fig. 3a) and for the fat image (Fig. 3b). As can be observed, water and fat features vary for all vertebrae, and one cannot always decide which feature is optimal. Segmenting both the water and the fat image simultaneously is expected to provide more robust and accurate segmentation results compared to using the water or fat features alone.
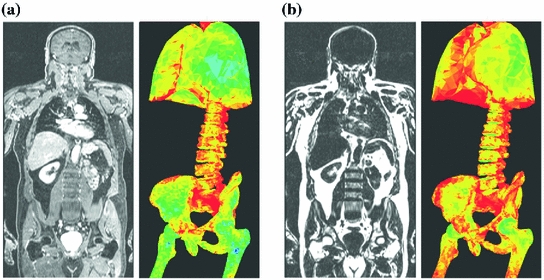
Fig. 3
Trained image features. a Water image from a single patient, Pat1, and the water feature quality in terms of simulated errors (see [11]) being trained on all patients. b Fat image from Pat1 and the fat feature quality being estimated from all patients. The color scale shows high quality features (green) to low quality features (red). As can be observed, water features are better around the lungs, femur, and pelvis. However, features around the vertebrae appear similar, and a simultaneous segmentation on both the water and fat image is expected to provide most reliable results
3 Experiments
3.1 Materials
Dixon MR images from 25 patients were acquired on a 3T MR Scanner (Philips Ingenuity TF PET/MR, Best, The Netherlands) using a quadrature body coil, with TR / TE / TE
/ TE
 3.2/1.11/2.0 ms and flip angle 10
3.2/1.11/2.0 ms and flip angle 10
 Monitoring of Syndesmophyte Growth in Ankylosing Spondylitis Using Computed Tomography
Monitoring of Syndesmophyte Growth in Ankylosing Spondylitis Using Computed Tomography
 Detection and Labelling in Lumbar MR Images
Detection and Labelling in Lumbar MR Images
 of Spinal Deformities Using a Parametric Torsion Estimator
of Spinal Deformities Using a Parametric Torsion Estimator
 Spine Disc Herniation Diagnosis with a Joint Shape Model
Spine Disc Herniation Diagnosis with a Joint Shape Model
 Segmentation and Discrimination of Connected Joint Bones from CT by Multi-atlas Registration
Segmentation and Discrimination of Connected Joint Bones from CT by Multi-atlas Registration
 Morphological and Appearance Features for Predicting Physical Disability from MR Images in Multiple Sclerosis Patients
Morphological and Appearance Features for Predicting Physical Disability from MR Images in Multiple Sclerosis Patients




/ TE 3.2/1.11/2.0 ms and flip angle 10
Related posts:
Spine Disc Herniation Diagnosis with a Joint Shape Model
Stay updated, free articles. Join our Telegram channel
Full access? Get Clinical Tree
