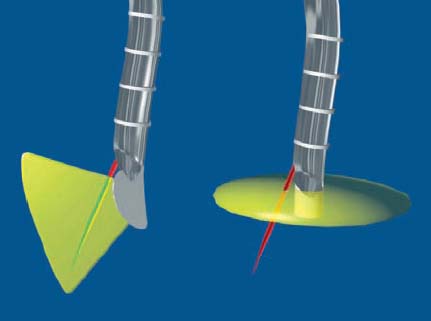
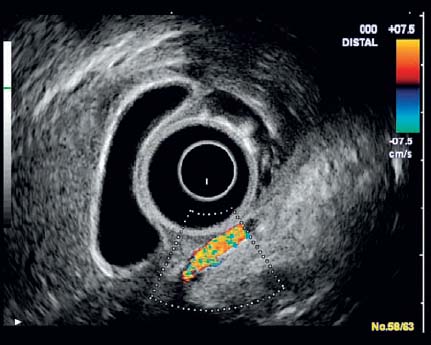
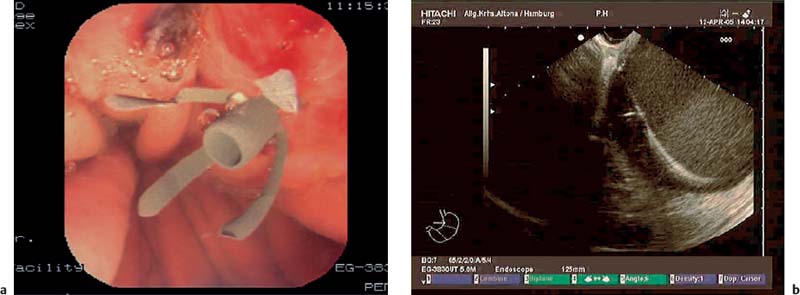
3 EUS meets VOXEL-MAN: a Software-Based Training System for Longitudinal EUS The indications for endoscopic ultrasound (EUS) have changed fundamentally in recent years. Starting with the interpretation of B-mode images, the range of indications has expanded to include more invasive diagnostic and therapeutic techniques. It was always possible to obtain convincing B-mode images with radial scanners, but the advent of invasive techniques required longitudinal echoendoscopes allowing optimal monitoring of the instruments inserted through the working channel into the ultrasound scanning area. There are two different techniques in EUS imaging (Fig. 3.1): • Radial scanning (radial EUS). The radial instrument produces a 360° image with a 90° angle to the axis of the endoscope (Fig. 3.1, right side). This results in a crosssectional imaging modality when the instrument is adapted to the sagittal axis of the human body—e.g., in the esophagus. Anatomic orientation is easier with a radial instrument, as the images match the viewing patterns of other cross-sectional modalities such as computed tomography (Fig. 3.2). • Longitudinal scanning (longitudinal EUS). This instrument produces a longitudinal sagittal sector image parallel to the axis of the endoscope (Fig. 3.1). It is challenging to understand these anatomical sections, as they are not comparable to the usual scans produced in computed tomography (CT) or magnetic resonance imaging (MRI). The examiner therefore needs to have excellent skills to achieve the correct orientation. Because of the flexible tip of the endoscope, multiple sections are available, which cannot be found in an anatomical atlas. For these reasons, longitudinal EUS is more difficult to learn than radial EUS (Fig. 3.3). Fig. 3.1 The two types of endoscopic ultrasound (EUS). Left: longitudinal EUS; right: radial EUS. For a considerable period, the main indication for endoscopic ultrasound was imaging of the wall of the gastrointestinal tract. High-frequency scanners allowed highresolution imaging of the wall layers, with improved staging of tumors in the wall. Longitudinal echoendoscopes provide a new range of invasive diagnostic indications, such as EUS-guided fine-needle aspiration (EUS-FNA), and invasive therapeutic indications, such as EUS-guided drainage of pancreatic pseudocysts (Fig. 3.4). Fig. 3.2 Radial EUS image of the body of the liver and the gallbladder. Fig. 3.3 Longitudinal EUS image of the head of the pancreas, with a migrated gallstone in the dilated pancreatic duct. Fig. 3.4a, b Optical (a) and longitudinal (b) EUS images of pancreatic pseudocyst drainage. The crucial aspect in invasive procedures is to control each step with endoscopic ultrasound. Only longitudinal echoendoscopes offer needle control, as the transducer has the same orientation as the axis of the endoscope, so that the needle moves within the ultrasound field (Fig. 3.1). Outstanding familiarity with the anatomy is important for recognizing the relationship between vessels and organs and minimizing the risk of injuring sensitive structures during invasive procedures. EUS meets VOXEL-MAN simulates the movements of a longitudinal endosonographic transducer in the human body on a Windows-based operating system. It is a learning tool for the complex anatomical relationships encountered in longitudinal EUS. The software program makes an important contribution to minimizing the risk for patients. EUS meets VOXEL-MAN consists of three main parts1–6: •
![]()
Stay updated, free articles. Join our Telegram channel


Full access? Get Clinical Tree


