inside the coil, with a rapid falloff of field strength outside the coil (see Fig. 12-1B). Amplitude of the current in the coil determines the overall magnitude of the magnetic field strength. The magnetic field lines extending beyond the concentrated field are known as fringe fields.
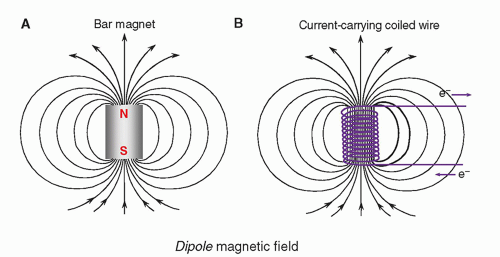 ▪ FIGURE 12-1 A. The magnetic field has two poles with magnetic field lines emerging from the north pole (N), and returning to the south pole (S), as illustrated by a simple bar magnet. B. A coiled wire carrying an electric current produces a magnetic field with characteristics similar to a bar magnet. Magnetic field strength and field density are dependent on the amplitude of the current and the number of coil turns. |
dipole is created for the proton, with a positive charge equal to the electron charge but of opposite sign, due to nuclear “spin.” Overall, the neutron is electrically uncharged, but subnuclear charge inhomogeneities and an associated nuclear spin result in a magnetic field of opposite direction and approximately the same strength as the proton. Magnetic characteristics of the nucleus are described by the nuclear magnetic moment, represented as a vector indicating magnitude and direction. For a given nucleus, the nuclear magnetic moment is determined through the pairing of the constituent protons and neutrons. If the sum of the number of protons (P) and number of neutrons (N) in the nucleus is even, the nuclear magnetic moment is essentially zero. However, if N is even and P is odd, or N is odd and P is even, the resultant non-integer nuclear spin generates a nuclear magnetic moment. A single nucleus does not generate a large enough nuclear magnetic moment to be observable, but the conglomeration of large numbers of nuclei (˜1015) arranged in a non-random orientation generates an observable nuclear magnetic moment of the sample, from which the MRI signals are derived.
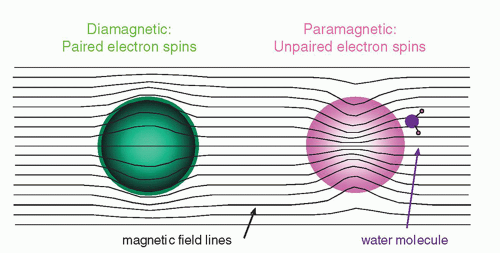 ▪ FIGURE 12-2 The local magnetic field can be changed in the presence of diamagnetic (depletion) and paramagnetic (augmentation) materials, with an impact on the signals generated from nearby signal sources such as the hydrogen atoms in water molecules. |
TABLE 12-1 PROPERTIES OF THE NEUTRON AND PROTON | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
are about 1021 protons, so there are approximately 3 × 10-6 × 1021, or 3 × 1015, more protons in the parallel direction! This number of excess protons produces an observable “sample” nuclear magnetic moment, initially aligned with the direction of the applied magnetic field. The classical description deals with a single net magnetization of an ensemble of nuclei.
TABLE 12-2 MAGNETIC RESONANCE PROPERTIES OF MEDICALLY USEFUL NUCLEI | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
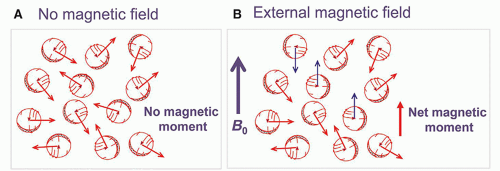 ▪ FIGURE 12-3 Simplified distributions of “free” protons without and with an external magnetic field are shown. A. Without an external magnetic field, a group of protons assumes a random orientation of magnetic moments, producing an overall magnetic moment of zero. B. Under the influence of an external magnetic field, some protons (blue vectors) in the tissue occupy two spin states: parallel or antiparallel to B0. The difference in number of spins between these two states is a few per million. A slightly greater number exist in the parallel direction at equilibrium, resulting in a measurable net magnetic moment of the tissue sample in the direction of B0. |
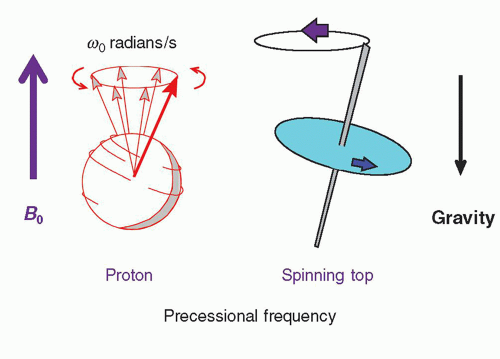 ▪ FIGURE 12-4 A single proton precesses about its axis at an angular frequency, ω, proportional to the externally applied magnetic field strength, according to the Larmor equation. A well-known example of precession is the motion a spinning top makes as it interacts with the force of gravity as it slows. |
| ||||||||||||||||
ramped up to the desired current and magnetic field strength by an external electric source. Replenishment of the liquid helium must occur continuously, because if the temperature rises above a critical value, the loss of superconductivity will occur and resistance heating of the wires will boil the helium, resulting in a “quench.” Superconductive magnets with field strengths of 1.5 to 3 T are common for clinical systems.
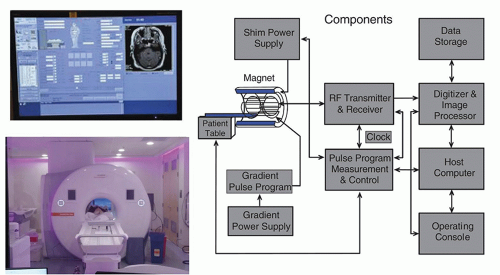 ▪ FIGURE 12-5 The MR system is shown (lower left), the operators display (upper left), and the various subsystems that generate, detect, and capture the MR signals used for imaging and spectroscopy. |
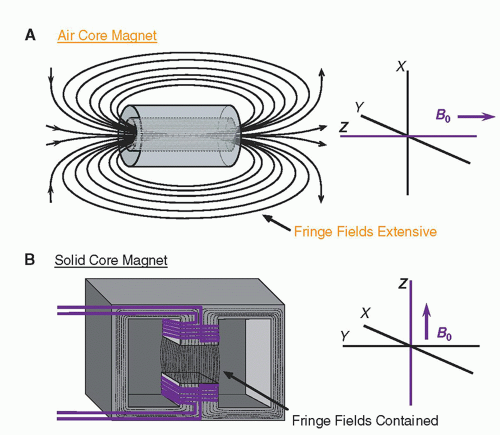 ▪ FIGURE 12-6 A. Air core magnets typically have a horizontal main field produced in the bore of the electrical windings, with the z-axis (B0) along the bore axis. Fringe fields for the air core systems are extensive and are increased for larger bore diameters and higher field strengths. B. The solid core magnet has a vertical field, produced between the metal poles of a permanent or wire-wrapped electromagnet. Fringe fields are confined with this design. In both types, the main field is parallel to the z-axis of the Cartesian coordinate system. |
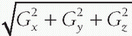 . Gradient polarity reversals (positive to negative and negative to positive changes in magnetic field strength) are achieved by reversing the current direction in the gradient coils. Two important properties of magnetic gradients are as follows: (1) The gradient field strength is determined by its peak amplitude and slope (change over distance), and typically ranges from 1 to 50 mT/m. (2) The slew rate is the time to achieve the peak magnetic field amplitude. Typical slew rates of gradient fields are from 5 to 250 mT/m/ms. As the gradient field is turned on, eddy currents are induced in nearby conductors such as adjacent RF coils and the patient, which produce magnetic fields that oppose the gradient field and limit the achievable slew rate. Actively shielded gradient coils and compensation circuits can reduce problems caused by eddy currents.
. Gradient polarity reversals (positive to negative and negative to positive changes in magnetic field strength) are achieved by reversing the current direction in the gradient coils. Two important properties of magnetic gradients are as follows: (1) The gradient field strength is determined by its peak amplitude and slope (change over distance), and typically ranges from 1 to 50 mT/m. (2) The slew rate is the time to achieve the peak magnetic field amplitude. Typical slew rates of gradient fields are from 5 to 250 mT/m/ms. As the gradient field is turned on, eddy currents are induced in nearby conductors such as adjacent RF coils and the patient, which produce magnetic fields that oppose the gradient field and limit the achievable slew rate. Actively shielded gradient coils and compensation circuits can reduce problems caused by eddy currents.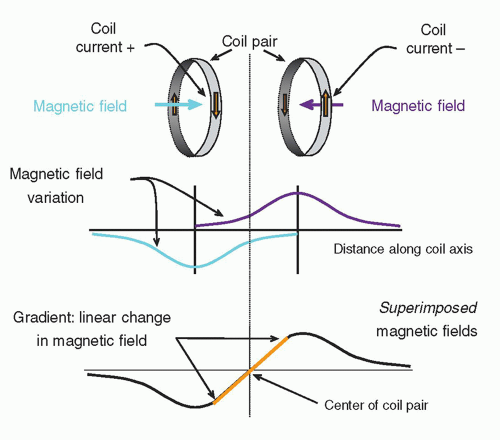 ▪ FIGURE 12-7 Gradients are produced inside the main magnet with coil pairs. Individual conducting wire coils are separately energized with currents of opposite direction to produce magnetic fields of opposite polarity. Magnetic field strength decreases with distance from the center of each coil. When combined, the magnetic field variations form a linear change between the coils, producing a linear magnetic field gradient, as shown in the lower graph. |
 ▪ FIGURE 12-8 Within the large stationary magnetic field, field gradients are produced by three separate coil pairs placed within the central core of the magnet, along the x, y, or z directions. In modern systems, the current loops are distributed across the cylinders for the x-, y-, and z-gradients, which generates a lower, but more uniform gradient field. Magnetic field gradients of arbitrary direction are produced by the vector addition of the individual gradients turned on simultaneously. Any gradient direction is possible by superimposition of magnetic fields generated by the three-axis gradient system. |
the SNR up to a factor of
 . If imbalances in the offset or gain of these detectors occur, then artifacts will be manifested, such as a “center point” artifact.
. If imbalances in the offset or gain of these detectors occur, then artifacts will be manifested, such as a “center point” artifact.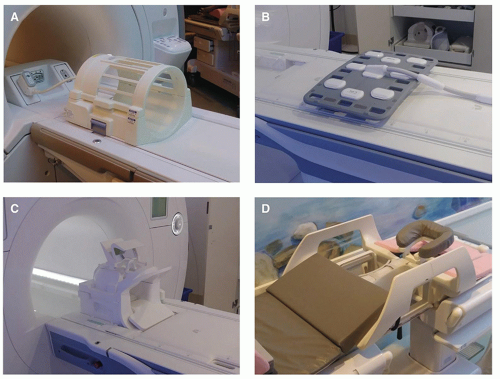 ▪ FIGURE 12-9 Radiofrequency surface coils improve image quality and SNR for specific examinations. A. A transmit/receive head coil. B. A flexible body coil and a spine coil imbedded on the table. C. A 64-channel phased array head and neck coil. D. A coil and a table dedicated for breast imaging and biopsy. |
 ▪ FIGURE 12-10 Internal components of a superconducting air-core magnet are shown. On the left is a cross section through the long axis of the magnet illustrating relative locations of the components, and on the right is a simplified cross section across the diameter. |
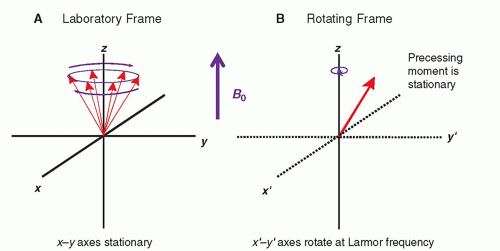 ▪ FIGURE 12-11 A. The laboratory frame of reference uses stationary three-dimensional Cartesian coordinates: x, y, z. The magnetic moment of the proton precesses around the z-axis at the Larmor frequency as the illustration attempts to convey. B. The rotating frame of reference uses rotating Cartesian coordinate axes that rotate about the z-axis at the Larmor precessional frequency, and the other axes are denoted: x′ and y′. When precessing at the Larmor frequency, the proton magnetic moment is stationary. |
occurs at an angular frequency equal to ω1 = γB1 as per the Larmor equation. Thus, for an RF pulse (B1 field) applied over a time t, the magnetization vector displacement angle, θ, is determined as θ = ω1t = γB1t, and the product of the pulse time and B1 amplitude determines the displacement of Mz. This is illustrated in Figure 12-14.
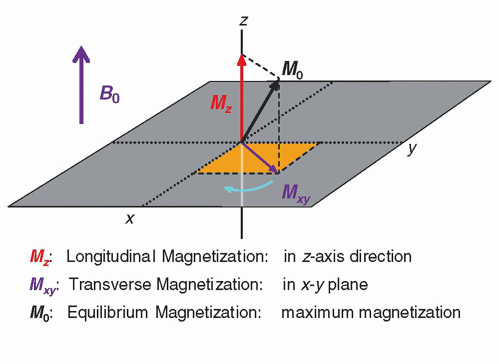 ▪ FIGURE 12-12 Longitudinal magnetization, Mz, is the vector component of the magnetic moment in the z direction. Transverse magnetization, Mxy, is the vector component of the magnetic moment in the x-y plane. Equilibrium magnetization, M0, is the maximum longitudinal magnetization of the sample, and is shown displaced from the z-axis in this illustration. |
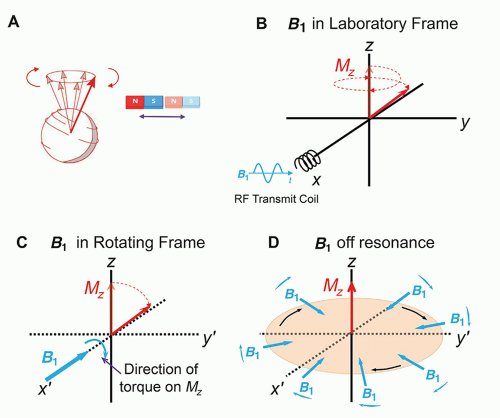 ▪ FIGURE 12-13 An intuitive description of magnetic resonance. A. A small magnet near a magnetic dipole moving back and forth at the resonance frequency increases the energy in the dipole and induces larger oscillation, an “excited” state. B. In the laboratory frame, sinusoidal magnetic fields generated by a coil in the x-axis excites the magnetic moment in the z-axis into the x–y plane. C. In the rotating frame, the RF pulse (B1 field) is applied at the Larmor frequency and is stationary in the x′-y′ plane. The B1 field interacts at 90° to the sample magnetic moment and produces a torque that displaces the magnetic vector away from equilibrium. D. The B1 field is not tuned to the Larmor frequency and is not stationary in the rotating frame. No interaction with the sample magnetic moment occurs. |
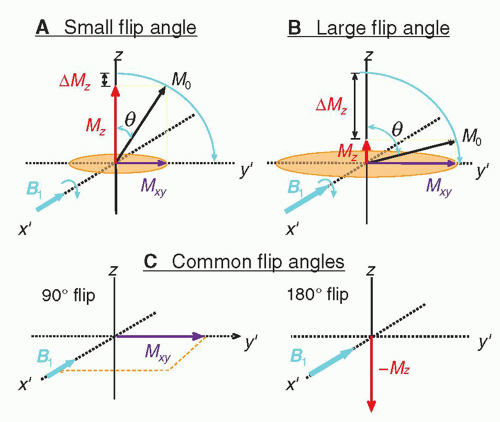 ▪ FIGURE 12-14 Flip angles describe the angular displacement of the longitudinal magnetization vector from the equilibrium position. The rotation angle of the magnetic moment vector is dependent on the duration and amplitude of the B1 field at the Larmor frequency. Flip angles describe the rotation of Mz away from the z-axis. Small flip angles (less than 45°) (A) and large flip angles (75° to 90°) (B) produce small and large transverse magnetization, respectively. C. Common flip angles are 90°, which produce the maximum transverse magnetization, and 180°, which invert the existing longitudinal magnetization to –Mz. |
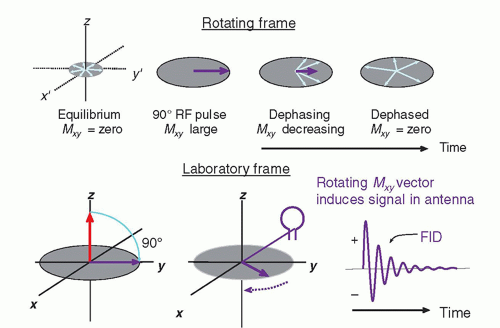 ▪ FIGURE 12-15 Top: Conversion of longitudinal magnetization, Mz, into transverse magnetization, Mxy, results in an initial phase coherence of the individual spins of the sample. The magnetic moment vector precesses at the Larmor frequency (stationary in the rotating frame), and dephases with time. Bottom: In the laboratory frame, Mxy precesses and induces a signal in an antenna receiver sensitive to transverse magnetization. An FID signal is produced with positive and negative variations oscillating at the Larmor frequency, and decaying with time due to the loss of phase coherence. |
Related posts:
 X-ray Production, Tubes, and Generators
X-ray Production, Tubes, and Generators
 X-ray Dosimetry in Projection Imaging and Computed Tomography
X-ray Dosimetry in Projection Imaging and Computed Tomography
 Magnetic Resonance Imaging: Advanced Image Acquisition Methods, Artifacts, Spectroscopy, Quality Control, Siting, Bioeffects, and Safety
Magnetic Resonance Imaging: Advanced Image Acquisition Methods, Artifacts, Spectroscopy, Quality Control, Siting, Bioeffects, and Safety
 Radiation Detection and Measurement
Radiation Detection and Measurement
Stay updated, free articles. Join our Telegram channel

Full access? Get Clinical Tree


