1. Understand the properties of ultrasound waves and the interactions sound waves have with human tissue.
2. Identify the different types of transducers used in diagnostic imaging and the benefits and limitations of each.
3. Describe the different fields and properties within an ultrasound beam.
4. Understand how ultrasound images are acquired and processed.
5. Understand how the Doppler effect is utilized in ultrasound imaging.
6. Identify common ultrasound artifacts and how these affect diagnostic interpretation.
7. Know how to apply quality assurance and quality control (QC).
8. Understand the potential biologic effects caused by ultrasound.
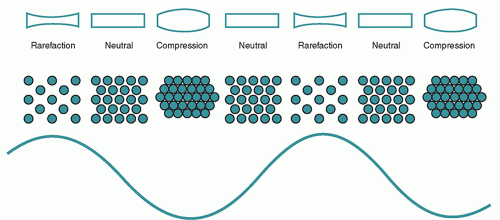 FIG. 7.1 • As ultrasound travels through soft tissue, alternative regions of high pressure and low pressure are produced. Those regions of high pressure, aka compressions, result from molecules being squeezed together, whereas those of low pressure, aka rarefactions, are created when molecules are pulled apart. Pressure change as a function of location can often be approximated as a sinusoidal curve. Reprinted with permission from Knight KL, Draper DO, Therapeutic Modalities. 2nd ed. Philadelphia, PA: Lippincott Williams & Wilkins, A Wolters Kluwer business; 2012. |
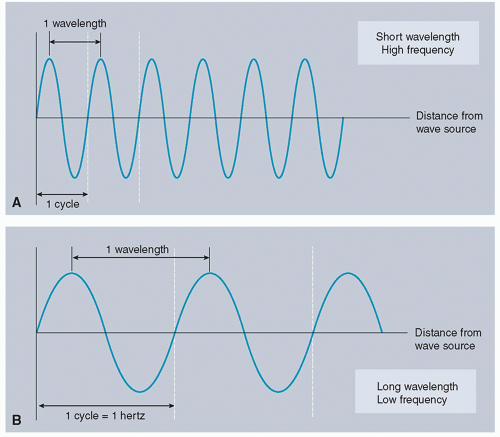 FIG. 7.2 • Two waveforms of different wavelengths; when they travel at the same speed, the one with shorter wavelength (A) needs more vibrations to travel the distance of a wavelength within the same time (i.e., higher frequency) than the one with longer wavelength (B) does. Wavelength is the distance between two successive peaks at any time point. Reprinted with permission from Fosbinder RA, Orth D. Essentials of Radiologic Science. 1st ed. Philadelphia, PA: Lippincott Williams & Wilkins, A Wolters Kluwer business; 2011. |
Table 7.1 DENSITY AND SPEED OF SOUND IN TISSUES AND MATERIALS FOR MEDICAL ULTRASOUND | ||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||||||||||||||||||||||||||||||||||||||
 FIG. 7.3 • When two ultrasound waves interact with each other, the output may be a constructive interference (left), destructive interference (right), or a complex interference pattern. Reprinted with permission from Savage RM, Aronson S, Shernan SK. Comprehensive Textbook of Perioperative Transesophageal Echocardiography. 2nd ed. Philadelphia, PA: Lippincott Williams & Wilkins, A Wolters Kluwer business; 2010. |
square meter (N/m2). Most diagnostic ultrasound beams deliver peak pressure levels of approximately 1 MPa (megapascal), which exceeds the earth’s atmospheric pressure 10-fold.
Table 7.2 RELATIVE IMPEDANCES OF MATERIALS OF INTEREST IN ULTRASOUND IMAGING | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||
Table 7.3 REFLECTION INTENSITIES AT AN INTERFACE BETWEEN SOFT TISSUE AND THE SPECIFIED MATERIAL | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||
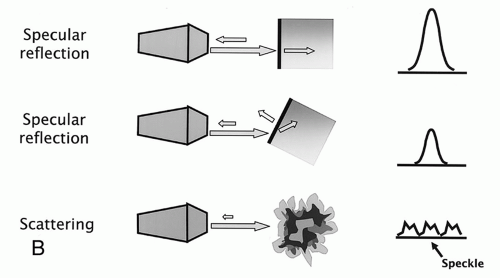 FIG. 7.4 • Ultrasound scattering is caused by small reflectors within a tissue. The characteristics of a particle in a specific tissue or organ lead to unique scatter patterns. Interactions at boundaries can also result in scatter, especially at higher frequencies. Reprinted with permission from Feigenbaum H, Armstrong WF, Ryan T. Feigenbaum’s Echocardiography. 6th ed. Philadelphia, PA: Lippincott Williams & Wilkins, A Wolters Kluwer business; 2004. |
the ultrasound. Objects described as hyperechoic have a higher scatter amplitude in comparison to the background signal, whereas hypoechoic objects demonstrate a relatively low-scatter amplitude.
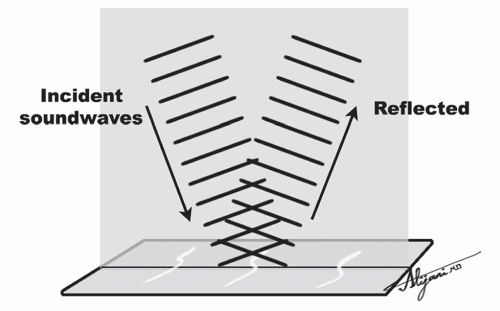 FIG. 7.5 • Specular reflection occurring from a smooth reflector. The angle of incidence is equal to the angle of reflection. Reprinted with permission from Huda W. Review of Radiologic Physics. 3rd ed. Philadelphia, PA: Lippincott Williams & Wilkins, a Wolters Kluwer business; 2010. |
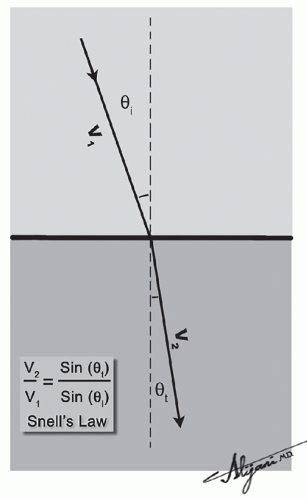 FIG. 7.6 • Refraction of an ultrasound beam. The angle of transmission (θt) is smaller than the incident angle (θi) when v2 < v1. Reprinted with permission from Huda W. Review of Radiologic Physics. 3rd ed. Philadelphia, PA: Lippincott Williams & Wilkins, a Wolters Kluwer business; 2009. |
the uterus. Ultrasound attenuation occurring in a homogeneous tissue is exponential. Tissues and fluids each possess a characteristic attenuation coefficient, and these vary widely (Table 7.4). Another way to calculate the rate of attenuation is as follows:
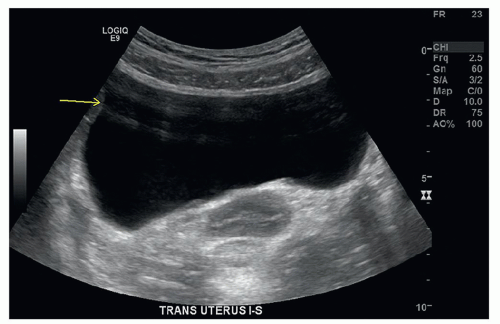 FIG. 7.7 • The distended bladder (arrow) serves as a “diagnostic window” to the uterus during the transabdominal portion of a pelvic ultrasound due to the low attenuation of simple fluid. |
Table 7.4 ATTENUATION COEFFICIENTS FOR SELECTED TISSUES AT 1 MHZ | ||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ||||||||||||||||||||||||
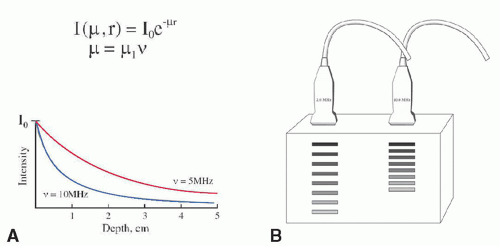 FIG. 7.8 • Ultrasound attenuation is an exponential function of depth and frequency (A). A higher frequency ultrasound wave undergoes higher attenuation within the same medium than a lower frequency wave (B). Reprinted with permission from Bigeleisen PE, Gofeld M, Orebaugh SL. Ultrasound-Guided Regional Anesthesia and Pain Medicine. 2nd ed. Philadelphia, PA: Lippincott Williams & Wilkins, a Wolters Kluwer business; 2015. |
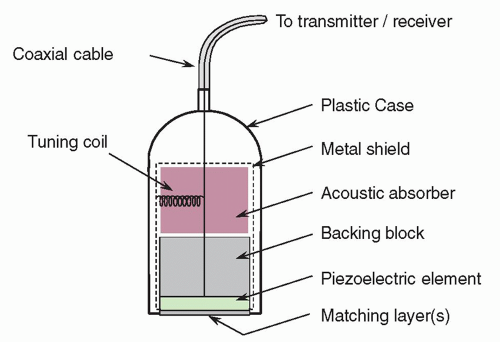 FIG. 7.9 • An ultrasound transducer is comprised of multiple components. Reprinted with permission from Bushberg JT, Seibert JA, Leidholdt EM, Boone JM. Essential Physics of Medical Imaging. 3rd ed. Philadelphia, PA: Lippincott Williams & Wilkins, a Wolters Kluwer business; 2012. |
with a broad bandwidth to achieve high spatial resolution along the direction of the beam. Figure 7.11 shows the examples of high and low Q transducers and their respective relationships with SPL.
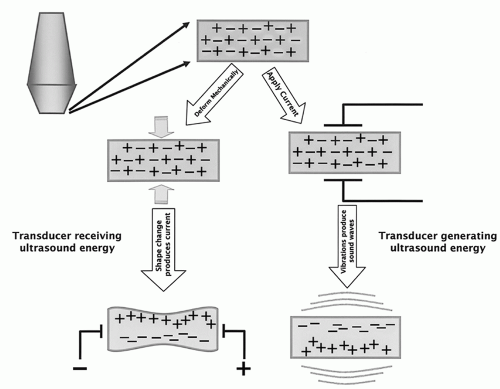 FIG. 7.10 • Illustration of how a piezoelectrical crystal works as the detecting/receiving component of an ultrasound transducer. When an electric current is applied to it, the crystal vibrates, resulting in the generation and transmission of ultrasound wave. When ultrasound wave is incident upon the crystal, it responds by producing an electrical impulse. Reprinted with permission from Penny SM. Introduction to Sonography and Patient Care. 1st ed. Philadelphia, PA: Lippincott Williams & Wilkins, a Wolters Kluwer business; 2015. |
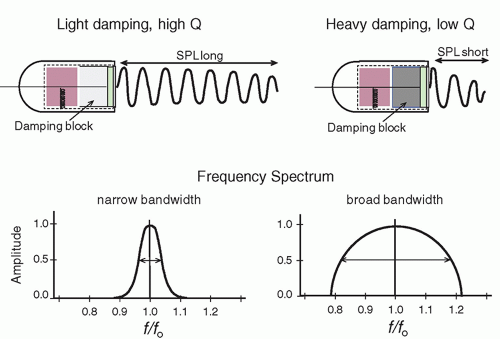 FIG. 7.11 • Damping block effect on the frequency spectrum. The damping block is located at the back of the transducer behind the piezoelectric material. Light damping allows many cycles to occur, which results in an increase in the SPL and a narrow frequency bandwidth. Heavy damping decreases the SPL and broadens the frequency bandwidth. The Q factor refers to the center frequency divided by the bandwidth. Reprinted with permission from Bushberg JT, Seibert JA, Leidholdt EM, Boone JM. Essential Physics of Medical Imaging. 3rd ed. Philadelphia, PA: Lippincott Williams & Wilkins, a Wolters Kluwer business; 2012. |
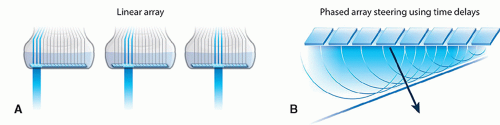 FIG. 7.12 • Multielement transducer arrays. A linear (or curvilinear) array generates a beam by firing a subset of the total number of transducer elements (A). A phased array produces a beam by firing all of the transducer elements with fractional time delays, which allow the beam to be steered and focused without moving the transducer (B). Reprinted with permission from Huda W. Review of Radiologic Physics. 4th ed. Philadelphia, PA: Lippincott Williams & Wilkins, A Wolters Kluwer business 2016. |
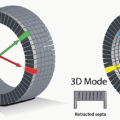
matching with the propagation medium, which allows for greater bandwidth capabilities, potentially lower costs owing to improved fabrication methods, and the ability to have integrated circuits on the same “wafer.” Because a wider pulse-echo bandwidth can be employed (typically >100%), the images obtained from CMUTs offer improved axial resolution, allowing for small targets to be resolved, and improved lateral resolution. State-of-the-art CMUT probes produce images that are comparable or even superior to those of conventional PZT probes. There is much promise surrounding 2D arrays in eventually leading to improvements in efficiency, speed, volumetric imaging, and multibandwidth operation. The 2D arrays of CMUTs offer the potential for real-time 3D imaging in harmonic imaging applications and in high-frequency applications, such as intravascular imaging.
Related posts:


Stay updated, free articles. Join our Telegram channel

Full access? Get Clinical Tree


