The survival of patients with compensated cirrhosis (> 12 years) is significantly longer than that of decompensated patients (∼ 2 years). Death in compensated patients occurs mostly after transition to a decompensated stage [2].
In CLD, clinical and biochemical evaluation are often irrelevant. Thus, liver biopsy (LB) is considered a key role for the diagnosis and follow-up of CLD, particularly in HCV chronic infected patients. The role of LB is to confirm the diagnosis of chronic hepatitis, to assess the necro-inflamatory activity (grading) and the severity of fibrosis (staging), to exclude another hepatopathy or an associated disease, and to certify the diagnosis of cirrhosis (when present) [5]. However, LB is an imperfect technique, highly invasive, prone to errors and clinical complications, with a sensibility ranging 80 % [6]. Also, practical issues are also raised, since the size of a biopsy specimen, which should be > 2.5 cm in length and between 1.2 to 1.8 mm in diameter, representing only a 1∕50000 of the total liver mass.
Clinical trends are leading to alternative, simple, and noninvasive methods. A direct consequence of this trend is a decrease in the performed LB of more than 90 %. The main advantages of these methods are the good cost/effective relation and wide accessibility. Among the noninvasive methods, ultrasound (US) is considered very promising and it is typically a frontline exam.
Cirrhosis is detected on US images by liver surface coarseness, portal mean flow velocity from Doppler, and changes of the liver parenchyma observed on the speckle textural characteristics [7]. As in clinical examination, US liver surface coarseness is a reliable indicator [8], directly correlated with the gross appearance of the cirrhotic liver, as seen at laparoscopy [9]. This morphological feature is best observed when ascites is present or when a high-frequency linear transducer (5–12 MHz) is used [9–13].
Most of the proposed US CAD systems for cirrhosis detection are based on linear transducers instead of the convex ones. Linear US transducers are able to achieve higher frequencies and thus increase image spatial resolution, enhancing the perception of image edges and details (e.g., liver surface) [14, 15], while reducing speckle noise. Nevertheless, Gaiani et al. [8] has reported the ability to detect this surface irregularity with low-frequency convex transducer (3.5–5 MHz). This possibility will be further studied in this work, since low-frequency convex transducers are normally used in abdominal US exams, performed in clinical practice.
Visual inspection of liver surface is the preferred approach in the majority of the studies. Table 1 summarizes the visual features used to characterize liver surface contour via US images. As referred in [16], these approaches are subjective, non-reproducible, and qualitative. Berzigotti et al. [11] is an example of the extraction of quantitative features, directly from the US image, with a dedicated software, for cirrhosis contour.
Table 1
Liver surface contour characteristics used to detect cirrhosis from US images
Class
US findings
Normal
Hyperechoic straight [10, 12] and regular [12] line, with a thickness less than 1 mm [10].
Multiple nodular irregularities on the ventral liver freely mobile, during respiratory excursion [9].
Dotted or irregular line and/or heterogenous liver parenchyma [12].
Curved line superior to 2.04 cm in a straight 2 cm segment line [11].
The goal of this chapter is to provide objective US morphological assessment of liver surface and textural information of the liver parenchyma for the detection of liver cirrhosis. The method is based on common US images (e.g., acquired with a low-frequency convex transducer), to be as reproducible as possible. To enhance liver surface details on US images, while avoiding noise amplification, a novel enhancement algorithm based on a phase congruency (PC) map computed from a de-speckled field is presented. This topic will be further discussed in section “Methods”.
To increase the robustness of the method, US textural features extracted from the liver parenchyma are combined with the morphological ones. Textural analysis of US liver parenchyma is a powerful tool for CLD diagnosis and staging. Image texture may be viewed as a global pattern arising from a deterministic or random repetition of local subpatterns or primitives. The structure resulting from this repetition is very useful for discriminating between the contents of the image of a complex scene [17].
Common features used for liver parenchyma analysis are: (1) textural based, e.g. first order statistic [18–20], co-occurrence matrix [20–22], wavelet transform [21, 23] and (2) depth attenuation and intensity related, e.g. attenuation along the depth [20, 24, 25] and backscattering [20, 24, 25] parameters and coefficients. In this chapter, we introduce the monogenic decomposition as a feature extractor from US images of the liver parenchyma, as well as the co-occurrence matrix.
A binomial classification is then considered, cirrhosis or non-cirrhosis, and several classifiers are used to assess the discriminative power of the selected features: (1) the support vector machine (SVM), (2) the Bayes classifier, and (3) the k-nearest neighbor (kNN). Several figures of merit were computed to assess and compare the performance of each classifier.
The remainder of this chapter is organized as follows. “Methods” formulates the problem discussed and it is organized in the following topics: “US Image Pre-processing” introduces the pre-processing algorithm used, the “Liver Surface Enhancement” describes the methods applied to enhance liver surface, with particular relevance to the use of phase congruency edge detection on the de-speckle field; “Liver Surface Detection and Feature Extraction” describes the algorithm used to detect liver surface and posterior extraction of morphological and textural features; and “Feature Selection and Classification Procedure” outlines the feature selection and classification techniques. The experimental results are given in the “Results” section and discussed in the section “Discussion and conclusions” which also summarizes the chapter.
Methods
In this section, a detailed description of the algorithms and methods used to formulate the problem is presented. In short, by using PC algorithm, a liver surface map is developed from the de-speckle field. Based on this, contour points are collected and morphological features extracted for cirrhosis detection. The performances of the detection algorithm are tested with four different classifiers.
US Image Pre-processing
To eliminate the influence of the US scanner and operator, US images are normalized and decomposed. The procedure described in [26] to separate the textural and intensity information within US images is here adopted. In this, an estimation of the radio frequency (RF) raw data is firstly done based on physical considerations about the data generation process, namely, by taking into account the US scanner parameters tuned by the clinician during the US exam.
The estimated RF image is decomposed in de-speckled and speckle fields according to the following model [26]
(1)
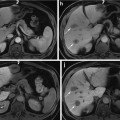
where η(i,j) are considered independent and identically distributed (i.i.d.) random variables with Rayleigh distribution. This image describes the noise and textural information and is called speckle field. In this model, the noise is multiplicative in the sense that its variance, observed in the original image, depends on the underlying signal, x(i,j). Figure 1 illustrates an example of the decomposition methodology in a US liver image of a patient with decompensated cirrhosis.
Fig. 1
Decomposition procedure of US liver parenchyma. (a) Observed B-mode US image. Estimated (b) de-speckle and (c) speckle fields
Liver Surface Enhancement
Speckle noise present in US images decreases the discriminative perception of meaningful details, namely, edges. Besides this difficulty, in clinical practice the perceived liver capsule and the adjacent overlying membranous structures (peritoneum, transverse fascia, pre-peritoneal fat) are not always clear and irregularities due to subfascial or sub-peritoneal pathology may be falsely described as abnormalities of the liver surface [9].
To reduce these drawbacks, the use of the de-speckle field is proposed to outline liver surface. This field is obtained in a Bayesian framework using a total variation edge preserving prior, with the ability to maintain the tissue interfaces and, therefore, the geometric shape of liver boundaries [26].
PC-based algorithm for edge detection is used to study liver surface detection accuracy. The results obtained with de-speckle images outperform the ones obtained with the common methods based on the B-mode US images, directly provided by the US scanner. Next a short description of the phase congruency algorithm [27] is given.
Contour regularity/smothness can be characterized from the PC map. PC is related to the local energy and it is invariant to image brightness and contrast [28]. Local Energy Model postulates that features are perceived at point in an image where the Fourier components are maximally in phase [29]. The local Fourier components at a location, x, in a signal will each have an amplitude Am(x) and a phase angle ϕm(x).
The magnitude of the vector from the origin to the end point is the local energy, |E(x)|. The measure of PC developed by Morrone [30] is:
(2)
If all Fourier components are in phase, all the complex vectors would be aligned and the ratio of |E(x)| = ∑mAm(x) would be 1. If there is no PC, the ratio falls to a minimum of 0 [29].
The wavelet transform is used to obtain frequency information to a point in a signal. To preserve phase information, linear-phase filters must be used like non-orthogonal wavelets that are in symmetric/anti-symmetric quadrature pairs. Let η(x), Mseand Msodenote the one-dimensional signal, even-symmetric (cosine) and odd-symmetric (sine) wavelets at scale s, respectively. The response vector, formed by the responses of each quadrature pair of filters, is as follows,
(3)
The amplitude of the transform at a given wavelet scale is given by
(4)
and the phase is given by
(5)
At each point x in the η signal, there is an array of these response vectors, one vector for each scale of filter. These response vectors form the basis of the localized representation of the signal, and they can be used in exactly the same way as Fourier components can be used to calculate PC.
A difficulty with phase congruency is its response to noise [27]. If the distribution of the noise response is determined, the noise T is taken to be:
(6)
where μrand σrdescribe the mean and standard deviation of the distribution describing the noise energy response, respectively, and k is typically in the range 2 to 3.
Taking the noise in consideration, the expression for PC is
(7)
where ⌊⌋ denotes that the enclosed quantity is equal to itself when its value is positive and zero otherwise, W(x) is a weighting function and ε is a small positive constant to avoid PC to became ill conditioned when all Fourier amplitudes are very small.
PC extension to a two-dimensional signal requires the formation of a 90 degree phase shift of the signal, which is accomplished using odd-symmetric filters. As one cannot construct rotationally symmetric odd-symmetric filters, one is forced to analyze a two-dimensional signal by applying the one-dimensional analysis over several orientations and combining the results.
To detect edges at all orientations, a bak of filters must be designed to tile the frequency plane uniformly. In the frequency plane, the filters appear as 2-D Gaussians symmetrically or anti-symmetrically placed around the origin, depending on the spatial symmetry of the filters. The length-to-width ratio of the 2-D wavelets controls their directional selectivity. This ratio can be varied in conjunction with the number of filter orientations used in order to achieve an even coverage of the 2-D spectrum. A more sensitive phase deviation function on which to base the calculation of PC is
(8)
where denotes the mean phase angle at orientation θ.
The approach of [27] produces the following equation for 2D phase congruency:
(9)
PC algorithm [27] was implemented with the following parameters. Six orientations and five scales were used. The wavelength of the smallest scale filters was 3 pixels, the scaling factor between successive filters was 2. A noise compensation k value of 2 was used. The cutoff c was set at 0.5 and γ at 10.
The performance of the PC detector for the original US image and de-speckle field was analyzed by estimated noise T value and by visual inspection, particularly inspecting the continuity of the detected contour line. Based on PC noise estimation it is expected that, due to the presence of speckle corruption, the original US image leads to more blurred definition of liver surface when compared with the de-splecke field.
Liver Surface Detection and Feature Extraction
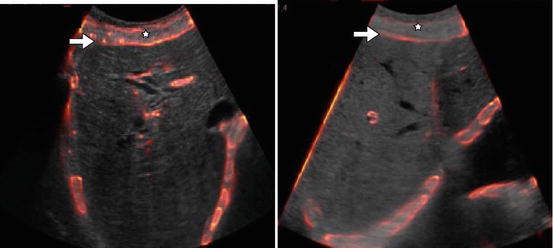
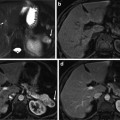
PC contour from the de-speckle field is then overlaid on the original US image to generate a liver surface enhancement. The aim of this overlay image is to aid the physician in the evaluation and selection of liver contour points. Figure 2 shows examples of the resultant US liver surface enhanced image obtained from the conducted experiments.
Fig. 2
Examples of the US liver surface enhanced image. The white arrow indicates the highlight given to the anterior liver surface, which aids in the inspection of the liver contour. The white star points to the fat/muscle layers that typically increase the difficulty in a correct identification of the contour
The liver surface contour is then extracted, for characterization purposes, using the snake technique proposed by [31], which computes one iteration of the energy-minimization of active contour models. To initialize the snake, the operator selects at least four points in the liver surface, as exemplified in Fig. 3.
Fig. 3
Example of the snake method in the de-speckle field: the initialization step (a), the resulting contour detection (b), and a scheme of the extracted angles and contour points (c)
Liver contour is characterized with respect to spatial coordinates and inclination angles. Based on the detected liver contour, the following features were extracted:
1.
root mean square (rms) of the different angles produced by the points that characterize the contour, rmsα, where the first point was assumed the reference point (as shown in Fig. 3)
2.
root mean square of the variation of the points of the contour in the y-axis (image depth), rmsy
3.
the mean (μ) and variance (σ2) of the referred angles, μα and σα2
4.
the variance of the y-axis coordinates at each point, σy2, and
5.
the correlation coefficient of the y-axis coordinates, Ry.
Thus, the morphological feature set, used in this thesis, is composed by a total of 6 features,
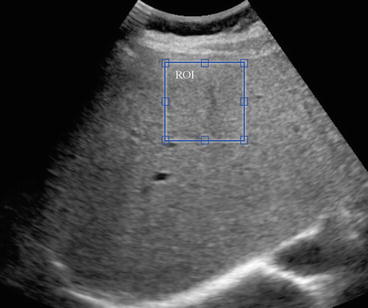
To increase the discriminative power of the method, textural features extracted from the US liver parenchyma are also considered for feature selection. From each speckle field, an ROI, of 128×128 pixels, is manually selected by an expert operator along medial axis, as exemplified in Fig. 4 with the criteria: (1) representative of liver parenchyma; (2) avoid major vessels and ligaments; and (3) as superficial as possible, to avoid US beam distortions. The following textural features are then extracted.
Fig. 4
Example of correct positioning of the ROI within an US image
Co-occurrence Matrix
A common approach for texture characterization is using the co-occurrence matrix, which is based on the definition of the joint probability distributions of pairs of pixels. The second-order histogram is defined as the co-occurrence matrix [32].
The elements of the Co-occurrence tensor, , describe the gray level spatial correlation in the image [32]. More precisely, element ci,j(Δl,Δc) represents the joint probability of the pixel intensities i and j in relative spatial position of (Δl,Δc) [32
Only gold members can continue reading. Log In or Register to continue


![$$\displaystyle{ [e_{s}(x),o_{s}(x)] = [\eta (x) {\ast} M_{s}^{e},\eta (x) {\ast} M_{ s}^{o}]. }$$](/wp-content/uploads/2016/03/A303895_1_En_6_Chapter_Equ3.gif)


 denotes the mean phase angle at orientation θ.
denotes the mean phase angle at orientation θ.

 Approach to Detection and Characterization of Hepatic Hemangiomas
Approach to Detection and Characterization of Hepatic Hemangiomas
 Resonance Imaging of Adenocarcinoma of the Pancreas
Resonance Imaging of Adenocarcinoma of the Pancreas
 Imaging of the Liver
Imaging of the Liver
 Self-Parameterized Active Contours for Medical Image Segmentation with Emphasis on Abdomen
Self-Parameterized Active Contours for Medical Image Segmentation with Emphasis on Abdomen
 Liver Segmentation Without Prior Statistical Models
Liver Segmentation Without Prior Statistical Models
 Surface Registration Using Ricci Flow
Surface Registration Using Ricci Flow



